Releases: stronnag/mwptools
Current Build (2024-02-26)
Changes
- Fix MSP serialisation / de-serialisation of FWApproach directions
- Fix MWXML serialisation of FWApproach directions
- Improve planned home generation for multi-missions
- Update user guide
Deprecation Notice
A number of Gtk3 components that are significant mwp dependencies (libchamplain and its dependencies, libgdl) are becoming obsolescent and are effectively unmaintained upstream. This is likely to be an ongoing problem (see more detail)
Migrating mwp to Gtk4:
- Is significant effort
- Not practical at the moment
- The Gtk4 replacements for
libchamplainandlibgdlare not sufficiently functional to meet mwp's needs - Some of the currently supported distros don't yet provide sufficient Gtk4 support.
- The Gtk4 replacements for
- Will probably happen at some stage
Dependencies
- For blackbox replay, you need the flightlog2x tools ; flightlog2x tools provides binary downloads for common Operating Systems.
- Please check the wiki Recent Changes document for any new dependencies since your last installation.
Installation
Preparation
- (Debian et al). Please ensure you have the
universerepository enabled - Ensure that the system is up to date: (Debian et al ...
sudo apt update && sudo apt upgrade).
Download and Install
It is necessary to download the archive and install it locally, e.g.
$ curl -LO https://github.com/stronnag/mwptools/releases/download/7.057.554/mwptools_7.057.554_amd64.deb
$ sudo apt install ./mwptools_7.057.554_amd64.deb
Otherwise, build from source (recommended).
WSL-G users, note that ser2udp.exe is unchanged.
Current Build (2024-02-15)
Changes
- Migration of all Gtk.Dialog to Gtk.Window. This is a rather large UI rework. Please report any inconsistencies and breakage.
- INAV 7.1.0 Autoland Support for safehome and missions. See User Guide.
- Experimental preview of Geozone editing (and other functions), anticipated to appear in INAV 8.0.0. See User Guide.
- If the drawing backend (
GDK_BACKEND) is not set, it now defaults toGDK_BACKEND=x11(i.e. use XWayland on Wayland systems). This is a result of the above elimination of Gdk.Dialog (which caused a number of UI responsiveness issues). If you must have a pure Wayland experience (e.g. GPU drivers that do not support X11 (e.g. Starfive VF2 RiscV SBC), then you should setGDK_BACKEND=wayland. This setting needs to be made before invoking mwp, or set in$HOME/.config/mwp/cmdopts. - Fix replay of mwp JSON logs
Deprecation Notice
A number of Gtk3 components that are significant mwp dependencies (libchamplain and its dependencies, libgdl) are becoming obsolescent and are effectively unmaintained upstream. This is likely to be an ongoing problem (see more detail)
Migrating mwp to Gtk4:
- Is significant effort
- Not practical at the moment
- The Gtk4 replacements for
libchamplainandlibgdlare not sufficiently functional to meet mwp's needs - Some of the currently supported distros don't yet provide sufficient Gtk4 support.
- The Gtk4 replacements for
- Will probably happen at some stage
Dependencies
- For blackbox replay, you need the flightlog2x tools ; flightlog2x tools provides binary downloads for common Operating Systems.
- Please check the wiki Recent Changes document for any new dependencies since your last installation.
Installation
Preparation
- (Debian et al). Please ensure you have the
universerepository enabled - Ensure that the system is up to date: (Debian et al ...
sudo apt update && sudo apt upgrade).
Download and Install
It is necessary to download the archive and install it locally, e.g.
# Manually use the asset link below, or ...
$ curl -LO https://github.com/stronnag/mwptools/releases/download/7.045.314/mwptools_7.045.314_amd64.deb
# then
$ sudo apt install ./mwptools_7.045.314_amd64.deb
Otherwise, build from source (recommended).
WSL-G users, note that ser2udp.exe is unchanged.
Current Build (2024-01-28)
- Fix crashed with
log-save-pathundefined - add 'ExtendedData' to GeoZones kml writer
- Instrument
fc-set - Clang 16 compatibilty
- run single instance of
mwp-plot-elevationsfor LOS analysis - add
--keep-alivetomwp-ble-bridge
Current Build (2023-12-25)
- Add TCP and UDP options to BLE bridge
- Fix modality of Terrain Analysis dialog
- Use internal kml writer for geozones
Current Build (2023-12-08)
Changes
- mwp supports Bluetooth Low Energy (BLE) devices. Please see the user guide for details and caveats for using BLE devices.
- Note that prior dev branch dependency on
libgattlibhas gone; mwp uses it's own implementation. - It is configurable whether to show all known BT devices, or just available (powered) devices (see user guide for setting).
- Note that prior dev branch dependency on
- mwp uses only local DEMs for elevation and line of sight analysis. Mapzen DEMs are downloaded on demand rather than using an external source (Bing). This improves both the accuracy and speed of terrain / LOS analysis.
- Geozones. If your FC supports Geozones (it probably doesn't), then any Geozones loaded into the FC will be downloaded and displayed on the map on FC connection.
- Miscellaneous logging improvements. You can create a logged note via the end of flight summary window.
Deprecation Notice
A number of Gtk3 components that are significant mwp dependencies (libchamplain and its dependencies, libgdl) are becoming obsolescent and are effectively unmaintained upstream. This is likely to be an ongoing problem (see more detail)
Migrating mwp to Gtk4:
- Is significant effort
- Not practical at the moment
- The Gtk4 replacements for
libchamplainandlibgdlare not sufficiently functional to meet mwp's needs - Some of the currently supported distros don't yet provide sufficient Gtk4 support.
- The Gtk4 replacements for
- Will probably happen at some stage
Dependencies
- For blackbox replay, you need the flightlog2x tools and its dependencies ; flightlog2x tools provides binary downloads for common Operating Systems.
- Please check the wiki Recent Changes document for any new dependencies since your last installation.
Installation
Preparation
- (Debian et al). Please ensure you have the
universerepository enabled - Ensure that the system is up to date: (Debian et al ...
sudo apt update && sudo apt upgrade).
Download and Install
It is necessary to download the archive and install it locally, e.g.
$ curl -LO https://github.com/stronnag/mwptools/releases/download/x.y.z/mwptools_x.y.z_amd64.deb
$ sudo apt install ./mwptools_x.y.z_amd64.deb
Otherwise, build from source (recommended).
WSL-G users, note that ser2udp.exe is unchanged.
Current Build (2023-11-11)
Changes
Line of Sight Tool
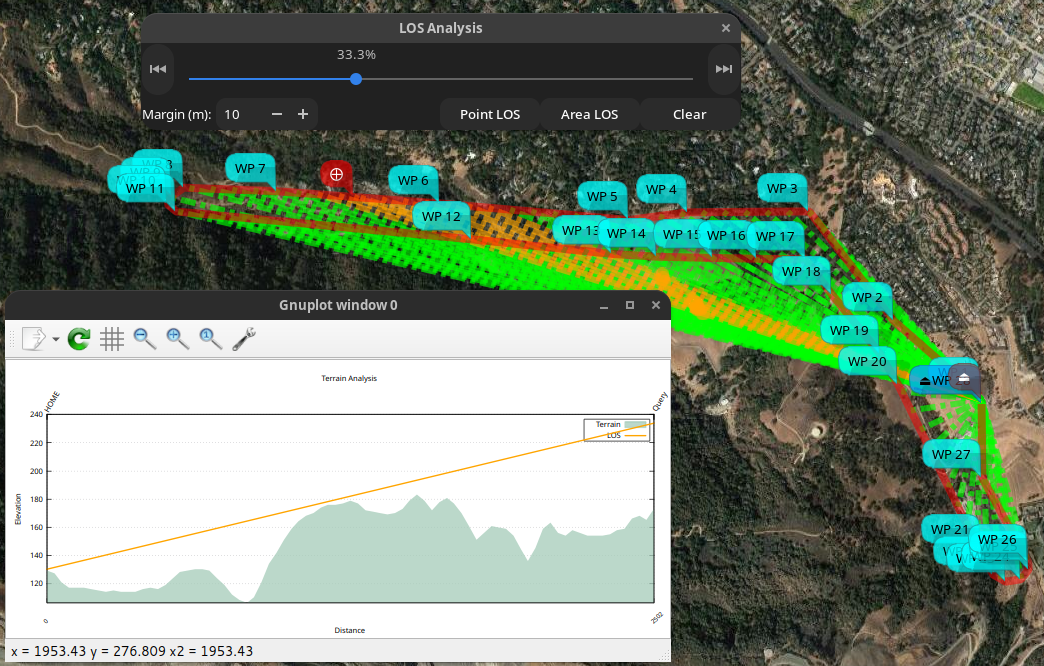
A new Line of Sight (LOS) analysis tool. mwp provides a LOS tool that establishes whether there is LOS between the observer location (the mwp home icon) and arbitrary points on an INAV mission. This is may be useful to establish:
- Can the pilot or observer see the aircraft?
- Is there LOS for RC control or video?
This also provides an automated analysis of the whole mission.
Full description in the User Guide
Other Changes
- Improve font scaling in dock items
- Improve opening "slow" serial devices
- Accept user defined places name for
--centreoption - Improve KML parser
Deprecation Notice
A number of Gtk3 components that are significant mwp dependencies (libchamplain and its dependencies, libgdl) are becoming obsolescent and are effectively unmaintained upstream. This is likely to be an ongoing problem (see more detail)
Migrating mwp to Gtk4:
- Is significant effort
- Not practical at the moment
- The Gtk4 replacements for
libchamplainandlibgdlare not sufficiently functional to meet mwp's needs - Some of the currently supported distros don't yet provide sufficient Gtk4 support.
- The Gtk4 replacements for
- Will probably happen at some stage
Dependencies
- For blackbox replay, you need the flightlog2x tools ; flightlog2x tools provides binary downloads for common Operating Systems.
- Please check the wiki Recent Changes document for any new dependencies since your last installation.
Installation
Preparation
- (Debian et al). Please ensure you have the
universerepository enabled - Ensure that the system is up to date: (Debian et al ...
sudo apt update && sudo apt upgrade).
Download and Install
It is necessary to download the archive and install it locally, e.g.
$ curl -LO https://github.com/stronnag/mwptools/releases/download/x.y.z/mwptools_x.y.z_amd64.deb
$ sudo apt install ./mwptools_x.y.z_amd64.deb
Otherwise, build from source (recommended).
WSL-G users, note that ser2udp.exe is unchanged.